
File:26396 PIA24980-webTopography an Between Mars Helicopter and Rover for Flight 17.jpg

Original file (1,060 × 1,060 pixels, file size: 345 KB, MIME type: image/jpeg)
| This is a file from the Wikimedia Commons. Information from its description page there is shown below. Commons is a freely licensed media file repository. You can help. |
Summary
| Description |
English: Topography an Between Mars Helicopter and Rover for Flight17
This annotated image from NASA’s Mars Reconnaissance Orbiter (MRO), and the topographic map below it, provide a look at the altitude of surface features standing between the agency’s Perseverance Mars rover and Ingenuity helicopter at the conclusion of the rotorcraft’s 17th flight at Mars on Dec. 5, 2021. In the image of the surface – taken by MRO’s High Resolution Science Experiment (HiRISE) camera – Ingenuity’s flight path is depicted in yellow. Perseverance’s location is indicated in the upper left, with the blue line delineating its line of sight to the helicopter’s landing spot. The location of the tallest point on Mars’ surface between rover and helicopter during its final descent is the hill near the center of image that the Perseverance science team has nicknamed “Bras,” after a city in France. The topographic map below the orbital image provides the elevation of surface features along the blue line, or Perseverance’s line of sight to helicopter. The height measurements to the left of the map are derived by comparing local elevations to the areoid (a model for an equipotential surface of Mars, analogous to “sea level” on Earth). The Ingenuity team believes the 13-foot (4-meter) height difference between the Perseverance rover and the top of Bras contributed to the loss of communications when the helicopter descended toward the surface at the end of its flight. The image’s background terrain was generated using data collected by the HiRISE camera aboard NASA's Mars Reconnaissance Orbiter. The University of Arizona, in Tucson, operates HiRISE, which was built by Ball Aerospace & Technologies Corporation, in Boulder, Colorado. NASA’s Jet Propulsion Laboratory, a division of Caltech in Pasadena, California, manages the Mars Reconnaissance Orbiter Project for NASA's Science Mission Directorate in Washington. The Ingenuity Mars Helicopter was built by JPL, which also manages the technology demonstration project for NASA Headquarters. It is supported by NASA's Science, Aeronautics Research, and Space Technology mission directorates. NASA's Ames Research Center in California's Silicon Valley, and NASA's Langley Research Center in Hampton, Virginia, provided significant flight performance analysis and technical assistance during Ingenuity's development. AeroVironment Inc., Qualcomm, and SolAero also provided design assistance and major vehicle components. Lockheed Martin Space designed and manufactured the Mars Helicopter Delivery System. Credit NASA/JPL-Caltech |
| Date | |
| Source | https://mars.nasa.gov/resources/26396/topography-between-mars-helicopter-and-rover-for-flight-17/ |
| Author | NASA/JPL-Caltech |
Licensing
| This file is in the public domain in the United States because it was solely created by NASA. NASA copyright policy states that "NASA material is not protected by copyright unless noted". (See Template:PD-USGov, NASA copyright policy page or JPL Image Use Policy.) | ||
 |
Warnings:
|
File history
Click on a date/time to view the file as it appeared at that time.
| Date/Time | Thumbnail | Dimensions | User | Comment | |
|---|---|---|---|---|---|
| current | 15:19, 9 December 2021 | 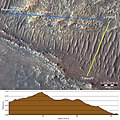 | 1,060 × 1,060 (345 KB) | Chinakpradhan | Uploaded a work by NASA/JPL-Caltech from https://mars.nasa.gov/resources/26396/topography-between-mars-helicopter-and-rover-for-flight-17/ with UploadWizard |
File usage
Global file usage
The following other wikis use this file:
- Usage on zh-min-nan.wikipedia.org